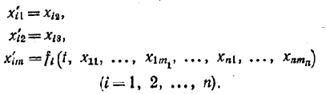
Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
1.5 ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ.
В случае, когда одна или более переменных могут наблюдаться только периодически, причем период наблюдения достаточно мал, так то все переменные можно восстановить с приемлемой точностью по их квантованным значениям, можно записать уравнения рассматриваемой
системы для дискретных (квантованных) значений для всех переменных. Иными, словами в качестве такой системы берется дискретная по времени система.
Исследование дискретных систем во многом подобно исследованию непрерывных систем.
Преобразование непрерывных систем в дискретные.
Пусть дана непрерывная система Y с уравнениями состояния
(1) x= Ax + Bu;
(2) y= Cx + Du, где
A,B,C,D суть (n*n), (n*r), (p*n) и (p*r)- постоянные матрицы
соответственно.
Предположим, что компоненты входного вектора замеряются периодически и фиксируются (сохраняются неизменными) в течении каждого интервала (kT,(k+1)T), где k=...,-1,0,1...
|
| ||||
U y
рис.1
На рисунке 1 показано, что такая операция над входным вектором реализуется с помощью блока квантования, включенного между входом U и системой Y.
Если α(t) является входом блока квантования, то его выход α0 будет ступенчатой функцией
α0(t)=α(kT), kT<t≤(k+1)T
Будем полагать, что вход измеряется через каждые T секунд, где T- период повторения или период квантования. Вход системы задается последовательностью векторов {Uk}, причем Uk=U(kT+).
Период повторения T выбирается достаточно малым, так что интерполирование последовательностей {xk}, {yk}, где xk= x(kT+), yk= y(kT+), определяет функции x(t), y(t) с приемлемой точностью для всех t. По этой причине имеет
смысл искать зависимости между последовательностями {xk},{yk} и входной последовательностью. Наиболее удобно представить такие последовательности в виде рекуррентных соотношений выражающих xk+1 и yk+1 через xk и Uk . Используя выведенные ранее уравнения и вводя обозначение:
(3) F=exp AT,
T
(4) G=( ⌡ [exp(AƮ)]dƮ)B, получим
0
получим
(5) xk+1= Fxk+Cuk
(6) yk+1= Cxk+1+Duk+1
Выражения (5),(6) являются уравнениями состояния дискретной системы, вход, выход и состояние которой определяется последовательностями векторов {uk}, {xk}, {yk} соответственно. Поскольку A,B,C,D постоянные матрицы, эта система линейна и стационарна.
Из (5) можно найти xk как функцию начального состояния x0 и последовательности {Ui}r-1
k-1
(7) xk=Fkx0+ ∑ FiGUk-i-1, k=1,2,3,...
i=0
РЕШЕТЧАТЫЕ ФУНКЦИИ.
Функции, определенные только в некоторых точках t1,t2 и т.д называются решетчатыми.
Пусть t= nT- равностоящие точки, где n- любое целое число, а T- постоянная, называемая периодом дискретности.
Тогда определенные в этих точка функции f[nT]
f[nT]
![]() Любой f(t)- непрерывной можно
Любой f(t)- непрерывной можно
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() поставить в соответствие некоторое множество решетчатых функций, если представить переменную
t=nT+ℰT (0≤ℰ≤1). При каждом фиксированном значении р переменной функцию f(nT+ℰT)
поставить в соответствие некоторое множество решетчатых функций, если представить переменную
t=nT+ℰT (0≤ℰ≤1). При каждом фиксированном значении р переменной функцию f(nT+ℰT)
-4T -3T -2T -T 0 T 2T 3T 4T nT
можно рассматривать как функцию, определенную в точках ℰT, (ℰ+1)T, (ℰ+2)T,....Такие функции называются смешанными решетчатыми функциями. f(nT+ℰT)=f[nT,ℰT]
(8) f (n-1)T,T = f[nT,0]
Конечные разности решетчатых функций.
Выражение Δf[n]=f[n+1]-f[n] (9) называется разностью первого порядка решетчатой функции f[n]
Δ2f(n)=Δ f[n+1]- Δf[n]- вторая разность
Δkf(n)=Δk-1f[n+1]- Δk-1f[n]- к-тая разность
Выражение значения решетчатой функции через ее конечные разности до порядка l включительно:
l
(10) f[n+l]= ∑ (kl) Δkf[n]; где (kt)=l!/k!(l-k)
k=0
РАЗНОСТНЫЕ УРАВНЕНИЯ .
Всякое соотношение, связывающую решетчатую функцию x[n] и ее разности до некоторого порядка K:
(11) Ф[n, x[n], Δ x[n],.., Δkx[n] =0, называется разностным уравнением. Соотношение (11) можно записать:
(12) Ф[n,x[n],x[n+1],x[n+2],...,x[n+k]=0, уравнение порядка K.
Рассмотрим пример.
(13) Δ3x[n]+ Δ2x[n]+2Δx[n]+2x[n]=f[n]
(13) можно переписать x[n+3]-2x[n+2]+3x[n+1]=f[n], если m=n+1, тогда:
(14) x[m+2]-2x[m+1]+3x[m]=f[m-1]
Таким образом, уравнение (13) является уравнением второго порядка.
Решетчатая функция x[n], которая обращает уравнение в тождество, называется решением разностного уравнения. Решение разностного уравнения (РУ) определяется наиболее просто, если (РУ) порядка К можно разрешить относительно функции x[n+k], т.е представить в виде:
(15) x[n+K]= F[n,x[n],x[n+1],...,x[n+k-1]]
Зададим К начальных условий при некотором значении аргумента n=n0: x[n0]=x0, x[n0+1]=x1,..., x[n0+K-1]=xk-1
Соотношение (15) определяет по заданным начальным условиям значение решения при n=n0+K. Используя значение x[n0+K], вычислим последовательно x[n0+K+1], x[n0+K+2] и все остальные x[n] при n≥n0+K.
Решение РУ (15) x[n]= ℰ[n,x0, x1,...,xk-1].
Рассматриваемая начальные условия мы получим общее решение уравнения (15) как функцию К произвольных постоянных C0,C1,..,Ck-1
(16) x[n]=ℰ[n,C0,C1,...,Ck-1]
Линейное РУ порядка К:
(17) a0[n]Δrx[n]+a1[n]Δr-1x[n]+....+ar[n]x[n]=f[n]
где r≥K, f[n], a0[n], a1[n], ... ,ar[n] - заданные решетчатые функции. Данное уравнение называется неоднородным РУ, если правая часть f[n]≠0, в противном случае это уравнение однородно.
Если решетчатые функции ℰ1[n], ... , ℰl[n] являются решением линейного однородного РУ:
x[n+K]+b1[n]x[n+K-1]+ ... +bk[n]x[n]=0, то функция
l
ℰ[n]= ∑ Ciξi[n], где (i=1,2, ... ,l) - произвольные постоянные,
i=1
также является его решением.
Совокупность К линейно независимых решений разностного однородного уравнения порядка К называется фундаментальной системой решений.
Если при n≥n0 существует фундаментальная система решений ℰ1[n],...,ℰk[n] однородного разностного уравнения, то общее решение этого уравнения выражается:
k
ℰ[n]= ∑ Ciℰi[n]
i=1
Общее решение линейного неоднородного разностного уравнения:
x[n+K]+b1[n]x[n+K-1]+ ... +bk[n]x[n]=f[n] равно сумме
частного решения ψ[n] и общего решения соответствующего однородного ур-я, т.е.
k
x[n]=ψ[n]+ ∑ Ciℰi[n]
i=1
где Ci - произвольные постоянные, Ei[n] - решение однородного уравнения, удовлетворяющие:
W(E1[n0],...,Ek[n0])≠0 (определитель).
Z - преобразования и его свойства.
![]()
| |||||
| |||||
![]()
![]() U y t
U y t
рис. 3.
Для изучения свойств и соотношений, связывающих входные и выходные последовательности системы, изображенной на рис.3, воспользуемся Z-преобразованием. (На рис.3 показана модель системы вход U с импульсным модулятором).
Определение Z-преобразование. функции U(0;∞) представляет собой функцию U комплексной переменной Z определяемую выражением:
∞
(18) U(z)=Z(U)= ∑ U(nT)Z-n , где
n=0
Т-период повторения импульсного модулятора.
Замечание: Если U имеет разрыв в любой дискретный момент kT, смысл соотношения (18) становится не вполне понятным. Поэтому будем всегда считать
U(nT)=U(nT+), n=0,1, ...
,т.е. все функции от времени, которые будут преобразовываться в дискретные, будут равны 0 для t<0, и если они непрерывны в некоторые дискретные моменты, то должны существовать значения U(nT-) и U(nT+).
Пример: функция времени z-преобразование
1(t) 1/(1-z-1)
[ВЮЮ4] e-αt 1/(1-z-1e-αt)
Согласно (18) U(z) определяется степенным рядом от z-1. Этот ряд сходится для всех z за пределами окружности |z|=Ru, где
![]() Ru=lim
SVp √ |U(nT)|
Ru=lim
SVp √ |U(nT)|
n→∞
Будем полагать, что каждая рассматриваемая функция имеет конечный радиус сходимости.
Если U является входом импульсного модулятора, то его выход равен
∞
U= ∑ U(kT)δ(t-kT)
k=0
Такая последовательность импульсов имеет преобразование Лапласа
∞
U(S)= ∑ U(kT)e-srT
k=0
Сравнивая (18) с данным соотношением, замечаем, что
U(z)|z=esT =U(S)
Th. Рассмотрим систему, изображенную на рис. 3. Пусть H(z) будет Z-преобразованием импульсной реакции h. Пусть у будет реакцией при нулевом состоянии на входе U, прикладываемый в момент t=0.
Тогда получим:
(19) Y(Z)=H(Z)U(Z) ,для |Z|>max(Ru,Rk)
Выражение (19) аналогично выражению Y(S)=H(S)V(S), которое устанавливает зависимость реакции при нулевом состоянии, импульсной реакции U входа непрерывной системы. По этой причине будем называть H(Z) дискретной передаточной функцией или передаточной функцией, Z-функцией.
∞
(20) H(Z)U(Z)= ∑ ylz-e=Y(Z), |Z|>max(Rh, Ru)
l=0
Формула для нахождения последовательности {y(kT)}, т.е. дискретного выхода.
Свойства Z-преобразования.
1. Теорема линейности.
Z(αf)=αZ(f ) ∀ комплексных чисел α, ∀|Z|>Rf
Z(f+g)=Z(f)+Z(g) ∀|Z|>max (Rf,Rg)
2. Теорема обращения
f(nT)=1/2∏j ⌡Г F(Z)Z-1 dZ, n=0,1,...,
где Г - любая замкнутая спрямляемая кривая, охватывающая начало координат и лежащая вне окружности |Z|=R>Rf.
3. Теорема о начальном значении.
f(0+)= lim F(Z)
Z→∞
4. Теорема сдвига.
Если F(Z) есть Z- преобразование последовательности {f0,f1,f2,...}, то Z-1F(Z) есть Z-преобразование последовательности {0,f0,f1,f2,...}.
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

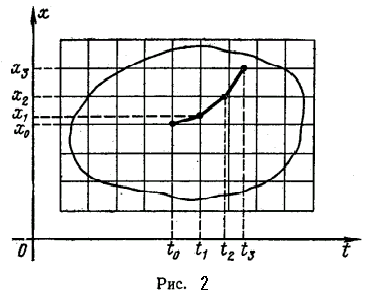
... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев