Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
1.6. СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ.
Введение: Реакция любой линейной системы содержит две составляющие: реакцию при нулевом входе и реакцию при нулевом состоянии, причем последняя характеризуется передаточной функцией.
Рассмотрим линейную стационарную систему У с несколькими входами и выходами описываемую уравнениями:
(1) x=Ax+Bu
(2) y=Cx+Du
где A,B,C,D- (n*n), (n*r), (p*n) и (p*r)- постоянные матрицы;
x- n-мерный вектор, характеризующий состояние данной системы;
u- входной r-мерный вектор, у- входной p-мерный вектор.
Будем говорить, что система У управляема, если при известных матрицах A и B и состоянии x0 системы при t0 можно найти некоторый вход u[t0,t0+T], который будет переводить систему из состояния x0 в нулевое состояние 0 в момент t0+T.
Опр. Система Ф, определенная уравнением (1) называется управляемой в том и только том случае, если для всех х0∈ℰN при начальном состоянии x0 системы в момент t=0 и некотором конечном T(T>0) найдется вход U[0,T]
такой, что:
(3) x(T;x0;0;U[0;T])=0
Опр. Состояние х1 системы У, описываемой уравнением (1), будем называть управляемым в том и лишь в том случае, если для некоторого конечного Т существует управление U[0,T] такое, что:
x(T;x1;0;U[0;T])=0
НАБЛЮДАЕМОСТЬ.
Понятие наблюдаемости тесно связано с понятием управляемости. Управляемость означает, что, зная начальное состояние и матрицы, характеризующие рассматриваемую систему, можно найти вход, который переводит это состояние в нулевое конечное время. Наблюдаемость означает, что знания матриц характеризующих систему, и реакции при нулевом входе Y[0,t] на конечном интервале достаточно для однозначного определения начального состояния данной системы.
Определение: система, описываемая (1) и (2) называется наблюдаемой в том случае, когда, для некоторого Т>0 и всех возможных начальных состояний х(0), значения матриц А и С и реакции при нулевом входе Y[0,t] достаточно, чтобы определить начальное состояние x(0).
Тh: Система, Y описываемая (1), (2) наблюдаема в том и лишь в том, случае, если на np столбцов матрицы Р=[С* ,А* С* ,..,А*(n-1) С* ] натянуто пространство состояний ℇ . ( Матрицы А*, С*,. получаются транспонированием матриц А, С,. и заменой их элементов комплексно сопряженными. )
ХАРАКТЕРИСТИКИ УПРАВЛЯЕМОСТИ.
Тh: Система Y , описываемая уравнением (1), управляема тогда и только тогда, когда на вектор столбцы В,АВ,..,B(n-1) матрицы Q≜[В,АВ,...,А(n-1)В] натянуто пространство состояний системы Y. Рассмотрим интерпритацию этой теоремы в терминах канонической экордановой формы матрицы системы. Такая форма позволяет определить управление, требуемое для перевода любого состояния в нулевое. Для простоты будем рассматривать систему с одним входом, описываемую уравнением:
(6) х=Ах+Вu
где А постоянная матрица порядка n, В -n-мерный вектор, u-скалярный вход.
Если минимальный многочлен матрицы А имеет степень k⋜ n-1, то система, характеризуемая уравнением (6), неуправляема.
Произведем замену переменных, положив х=Тy, причем матрица Т такова, что Т(-1)АТ=J, где J-каноническая форма Экордана матрицы А. Если обозначить е=Т(-1)В, то уравнение (6) преобразуется к виду:
(7) y=Jy+eU
Th. Пусть А имеет различные собственные значения, так что J=diag(ℷ1,...,ℷN). Тогда система, описываемая (6), управляема в том и только в том случае, когда все компоненты вектора e=Т-1В отличны от нуля.
1.7. СИГНАЛЫ В ЗАДАЧАХ УПРАВЛЕНИЯ И НАБЛЮДЕНИЯ ДИНАМИЧЕСКИХ ОБЬЕКТОВ.
Временная функция (форма передачи), передаваемая материальным параметром, называемым носителем информации или пространственное размещение (форма заполнения ), называется сигналом, если она по меньшей мере с помощью одного из ее параметров передает информацию.
пример:

![]()
![]()
![]() t t
t t
Носителем информации здесь является электрическое напряжение; информационным параметром амплитуда импульса. В качестве сигнала можно рассматривать временную функцию U(t) (математическую функцию).
Сигналы называются аналоговыми или дискретными, если они передают или изображают аналоговую или дискретную информацию. В аналоговых сигналах информационные параметры в пределах определенных границ могут принимать любое значение, а в дискретных сигналах они принимают только дискретные значения.
Дискретные сигналы, информационные параметры, которых могут принимать только два дискретных значения, называются двоичными.
Цифровыми сигналами являются закодированные дискретные сигналы, в которых дискретные значения информационного параметра соответствуют словам условного алфавита. Все дискретные сигналы не являющиеся цифровыми называются многозначными. Для классификации сигналов имеет значение разделения их на непрерывные и импульсные.
Сигналы называются непрерывными, если их информационные параметры изменяются в любой момент времени, и импульсными, если они изменяются в дискретные моменты времени.
Схема прохождения сигналов кибернетической системы представляет собой граничное изображение (статической и динамической) характеристик звеньев и связей с общей системой. Схема прохождения сигналов представляет собой графическое изображение математической модели системы. Математическая модель является совокупностью всех уравнений, которые описывают соотношение между всеми рассматриваемыми входными и выходными сигналами. Для изображения схем прохождения сигналов наиболее употребительны два способа, которые имеют определенные преимущества: способ изображения в виде структурной схемы и изображение в виде графа прохождения сигнала. При изображении схемы прохождения сигналов в виде структурной схемы звенья показываются в виде блоков, а стрелками указываются направления прохождения сигналов. Структурная схема представляет собой схематическое (качественное) изображение передаточных звеньев системы и ее связей через входные и выходные сигналы. Качественное описание характеристики звена с выходными сигналами U1,...,Um должна пониматься характеристика передачи в установившемся режиме, которая описывается статическим передаточным уравнением:
(1) xg=x(∞)=lim x(t)=f(U1,...,U v)
t→∞
в случае если существует х (∞).
Под динамическими характеристиками понимается зависимость выхода системы от ее входа в переходном процессе. Динамическая характеристика системы или звена может, быть описана различными способами.
Для аналоговых звеньев, входные и выходные характеристики которых изменяются непрерывно, характеристика передачи может быть, описана следующим дифференциальным уравнением в скалярной форме (после деления всех членов на коэффициент х”)
(2) xn +An-1 xn-1+...+A1 x+A0 x=Bm Um+...+B0 U
где U(t)-входной сигнал, x(t) выходной сигнал.
x=q1, x=q2, xn-1=qn получим уравнения системы для случая одномерного пространства:
(3) q(t)=Aq(t)+Bu(t)
x(t)=cTq(t)+du(t)
CКАЧКООБРАЗНАЯ И ПЕРЕХОДНАЯ ФУНКЦИИ.
Передаточные свойства линейного звена характеризуются реакцией на скачкообразное изменение входного сигнала:
![]() us(t)=uоδ(t)= 0, при t<0
us(t)=uоδ(t)= 0, при t<0
u0, при t⋝0
здесь δ(t) является единичной скачкообразной функцией:
![]() δ(t)≜ 0, при t<0
δ(t)≜ 0, при t<0
1, при t⋝0
Значение скачкообразной функции основывается на том, что единичный входной сигнал u(t) может быть разложен на последовательность сдвинутых по времени скачкообразных функций с разными амплитудами.
![]()
 u(t)
u(t)
![]()
![]()
![]()
![]() рис 1.
рис 1.
t
Благодаря применяемому для линейных систем методу суперпозиций соответствующий выходной сигнал можно получить путем наложения друг на друга реакций системы на отдельные скачкообразные функции. Реакция на единичное воздействие, хs(t) линейного звена:
xs(t)≜q us(t)=q U0δ(t) (4)
Переходная функция h(t) линейного звена:
(5) h(t)≜xs(t)/U0=q(t)
Переходная функция линейного звена представляет собой его реакцию на единичное воздействие, отнесенную к амплитуде скачка вх. сигнала.
ИМПУЛЬСНАЯ И ВЕСОВАЯ ФУНКЦИИ.
Аналогично скачкообразной функции и реакции на единичное воздействие импульсная функция и соответствующая реакция на импульсное воздействие могут служить для характеристики передаточных свойств линейных звеньев. Этот метод заключается в том, что входной сигнал u(t) может быть представлен в виде последовательных импульсов функций рис 2
 |  | ||||
![]() 1/u u→0
1/u u→0
 | |||||
u u
рис 2 рис 3
Разложение сигнала в последовательность импульсных эвристическая интерпретация функций
Для хорошей аппроксимации, ширина u приведенных на рис. 2, 3 функций, должна быть ничтожно мала. Реакция на импульсное воздействие х(t) линейного звена:
(6) x↑(t)≜q*u↑(t)=q*A*δ(t)
(* -обозначается свертка функции u(t) и q(t) с помощью интеграла свертки); δ(t)-импульсная функция; А - площадь импульса u↑(t). Весовая функция q(t) линейного звена:
q(t)≜ x↑(t)/A=q*δ(t)
Весовая функция q(t) линейного звена представляет его реакцию на импульсное воздействие, отнесенную к интегралу от входного сигнала, взятому по времени.
В соответствии с общим значением импульсного сигнала (рис 3) следует, что весовая функция является свойством
передаточного звена, которое определяет его особенности при передаче сигнала. Схема прохождения сигнала: изображение в виде графа прохождения сигнала.
Граф представляет собой схему, состоящую из узлов и ветвей, соединяющих узлы. Граф прохождения сигналов, представляет собой граф с направленными ветвями.
 |  |
x(t)=cu(t) узел x(p)=G(p)U(p)
x(t)=f{u(t)}
рис 4
При изображении схемы прохождения сигналов в виде графа, сигналы условно изображаются узлами, а звенья ветвями с указанием направления передачи. При этом принимается, что изображению временной функции (рис 4а) соответствует выражение:
x(t)=Cu(t) или x(t)=F{u(t)}
С - постоянная,F оператор, являющийся функцией времени.

![]()
![]()
![]() ДЕТЕТМЕНИРОВАННЫЕ СТОХАСТИЧЕСКИЕ СИГНАЛЫ И СИСТЕМЫ.
ДЕТЕТМЕНИРОВАННЫЕ СТОХАСТИЧЕСКИЕ СИГНАЛЫ И СИСТЕМЫ.
u u u
а) t б) t в) t
![]() u
u
а-в детерминированные сигналы
 г - стохастический сигнал
г - стохастический сигнал
Рис. 5
![]() г) t
г) t
Характеристика сигналов, представленных на рис 5, а –в, очевидно, что может быть однозначно описана аналитической функцией для всех t, если характер этой зависимости сохраняется за пределами показанного интервала. Таким образом, значение в каждый момент времени t определено, т.е. детерминировано.
Но это не имеет место для сигнала, показанного на рис 5г. Его характеристика, замеренная в конечном интервале времени, может быть с большими трудностями и разной степенью точности описана на этом интервале. Отсюда, дальнейшее значение изменение сигнала, нельзя точно предугадать заранее. Временная характеристика таких сигналов является случайной функцией. Такие сигналы получаются из-за многих, причин, которые вследствие больших трудностей не могут быть достаточно проанализированы.
Подобного вида сигналы называются стохастическими сигналами.
Сигналы называются детерминированными, если их временная характеристика, может быть, однозначно определена.
Сигналы называются стохастическими, если их временные характеристики являются случайными функциями, причем для этих характеристик могут быть указаны общие статические параметры.
Если все сигналы в системе детерминированы, то также оказываются детерминированными временные характеристики всей системы.
Стохастические сигналы могут возникать в системе из-за того, что-либо входные сигналы являются стохастическими, либо определенные параметры системы подвержены случайным колебаниям.
Системы называются детерминированными, если все сигналы (вход, состояние, выход) детерминированы, и стохастическими, если, по крайней мере, один сигнал является стохастическим. В детерминированных системах возможна детерминированная обработка задачи управления, стохастическая система требует стохастической обработки.
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

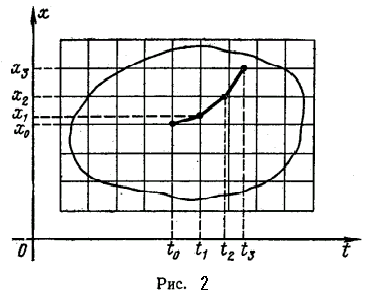
... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев