Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
1. Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию.
2. Заданные параметры (температура, давление и т.д.) должны регулироваться так, чтобы обеспечивался удовлетворительный или оптимальный режим работы, чтобы желаемый выходной продукт производился в достаточном или в максимально возможном количестве, чтобы заданное количество выходного продукта имело минимальную себестоимость.
3. При изменении производственной задачи или условий протекания, процесс должен легко перестраиваться на другой режим работы. Например, пуск и остановка процесса загрузки, производственного или энергетического процесса при ремонте и т.д. Задача 2 требует построения только статической модели процесса и является статической проблемой, так что мы можем говорить об управлении в статическом режиме.
Задачи 2 и 3 касаются динамического режима, так как компенсация изменяющихся возмущающих воздействий, необходимая для стабилизации, сравнение параметров процесса с изменяющимся задающим воздействием, а также перестройка при переходе от одного режима в другой, могут быть решены только с учетом динамических характеристик процесса. Отсюда следует, что здесь идет речь об управлении в динамическом режиме.
В качестве основы для отыскания решения и оценки качества приложенной схемы управления используем количественную меру. Она выражается целевой функцией. При решении проблем 1 и 3 может быть использовано время T, в течении которого автоматическая система компенсирует скачкообразное возмущающие воздействие с точностью до заданной допустимой погрешности или в течении которого будет осуществляться процесс перехода в новое состояние. Время T при этом характеризует качество автоматического управления. При решении проблемы 1 можно использовать интеграл от абсолютной ошибки, представляющий разность между заданными и действительными значениями регулируемой величины в том случае можно говорить о функции ошибки.
В зависимости от того, что выражает целевая функция (качество или прибыль, ошибку или стоимость), цель к которой надо стремится, состоит в том, чтобы изменять регулируемые величины или свободные параметры в пределах допустимых или возможных границ так, чтобы целевая функция имела максимальное или минимальное значение. Таким образом, мы получим оптимальное управление. В других случаях, например, при отсутствии полных сведений о процессе или с целью снижения затрат на аппаратуру и вычислительные устройства, можно ограничиться субоптимальным, удовлетворяющим уравнением.
МАТРИЧНЫЙ ФОРМАЛИЗМ В ТЕОРИИ СИСТЕМ.
ЛИНЕИНЫЕ ОПЕРАТОРЫ.
Рассмотрим линейное n - мерное пространство Un. Пусть задано правило, которое ставит в соответствии произвольному вектору X пространства Un определенный вектор Y того же пространства. В этом случае вектор X называется прообразом, а вектор Y - образом вектора X. Это правило называется преобразованием пространства Un или оператором, заданном в пространстве Un.
Преобразования (операторы) будем условно обозначать буквами А,В,С,... Например можно написать, что:
(1) АХ=Y
Равенство (1) читается так: преобразование (оператор) А, примененное к вектору Х, ставит ему в соответствие вектор Y.
Преобразование (оператор) называется линейным преобразованием (линейным оператором), если выполнено условие:
(2) A(Х+Y)=АХ+АY
(3) А(ℷХ)=ℷ(АХ), где ℷ- произвольное число
таким образом, линейное преобразование переводит сумму векторов в сумму их образов, а произведение вектора на число в произведение образа того вектора на это же число.
ИНВАРИАНТНОЕ ПОДПРСТРАНСТВО.
Пусть Х n - мерное линейное пространство и у=Ах -линейное преобразование на пространстве Х. Пусть X1∈X является некоторым подпространством Х, обладающим однако, тем свойством, что если х∈Х1, то и у=Ах∈Х1. Подпространство Х1, обладающее подобными свойством, называют инвариантным относительно линейного преобразования у=Ах.
Особенно интересны одномерные инвариантные пространства, представляющие собой прямые в пространстве Х, проходящем через начало координат.
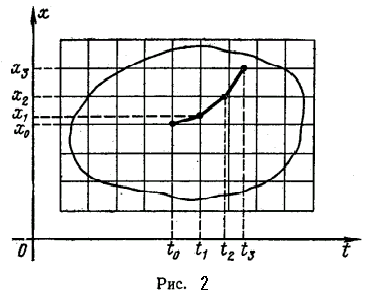
Если х - произвольная точка пространства Х α - ве[ВЮЮ1] [ВЮЮ2] щественная переменная, меняющаяся от -∞ до +∞, то dx будет представлять собой одномерное подпространство Х, проходящее через х(при α =0), как показано на рисунке 2.
![]()
![]()
![]()
 x2
x2
3
dx
![]()
2 x1
Такое одномерное подпространство будем обозначать R1. Предположим, что среди бесконечного множества одномерных пространств R1 найдутся такие, которые инвариантны относительно у=Ах, т.е. для любого x∈R1, имеет место у=Ах∈R1.
Обозначим через ℷ отношение у к х, которое при этом будет просто вещественным числом, т.е. можно записать у=ℷх, таким образом если R1 -инвариантное пространство, то для х∈R1 имеет место равенство:
(4) Ах=ℷх
Вектор х≠0, удовлетворяющий соотношению (4) называют собственным вектором матрицы А, а число ℷ - собственным значением матрицы А.
Для определения характеристических чисел матрицы перепишем соотношение (4) в ином виде, введя тождественное преобразование х=Iх. При этом получим:
(5) (А-ℷI)х=0
Соотношение (5) представляет собой систему линейных однородных уравнений, которая может быть записана в явном виде как:
![]() (a11-ℷ)x1+a12x2+...+a1nxn=0;
(a11-ℷ)x1+a12x2+...+a1nxn=0;
(6) a21x1+(a22-ℷ)x2+...+a2nxn=0;
.........................
an1 x1+an2x2+...+(a nn-ℷ)xn=0;
Матрица вида (А-ℷI) (6) называется характеристической матрицей А. Определитель характеристической матрицы называется характеристическим многочленом матрицы А. Корни характеристического многочлена матрицы называются характеристическими числами этой матрицы. Из свойств решения уравнения (6) нетривиальное решение (отличное от нуля) возникает только тогда, когда имеется бесчисленное множество решений:
(7) det(A-ℷI)+a0ℷn+a1ℷn-1+....+an-1ℷ=0
Подставив любое собственное значение в исходную систему уравнений (6), получим уравнение:
(8) (А-ℷiI)х=0
которое имеет непрерывное решение, так как det(A-ℷiI)=0
Это решение дает вектор хi, определяемый с точностью до скалярного множителя. Этот вектор называется собственным вектором матицы А.
Свойства:
1. Если собственные числа матрицы А различны (корни характеристического уравнения не равны), то порождаемые или собственные векторы образуют систему линейно независимых векторов.
2. Если матрица А симметрическая, то собственные числа такой матрицы всегда вещественны, а собственный вектор в матрице образует систему ортогональных векторов.
Линейные пространства, элементами которых являются, упорядоченные последовательности n-вешественных чисел называются векторами.
ДЕЙСТВИЯ НАД ВЕКТОРАМИ.
Упорядоченные последовательности из n - чисел х(1),...,х(n), могут быть записаны в виде вектор - столбца или вектор - строки;
![]()
 x(1) n n
x(1) n n
(9) х= ..... = x)i) ; (x(1),...,x(n))=(x(i))
x(n) 1 1
Эти числа, составляющие вектор, называются компонентами вектора.
Если один из этих векторов обозначить буквой х, то другой будем обозначать х и называть транспонированным вектором.
n
(10) х=(х(i)) =(х(1),...,х(n))
1
Число n компонент вектора называется его размерностью.
СВОИСТВА ВЕКТОРОВ.
а) х=у, если равны их компоненты:
x(i)=y(i)


![]() x(1) y(1) x(1)+y(1)
x(1) y(1) x(1)+y(1)
б) х+у= ...... + ...... = ........... -сумма векторов.
x(n) y(n) x(n)+y(n)
в) Разность векторов х-у представляет собой вектор z, такой, что у+z=х.
г) умножение вектора на скаляр

 x(1) αx(1)
x(1) αx(1)
αx[ВЮЮ3] =хα=α ....... = .........
x(n) αx(n)
СКАЛЯРНОЕ ПРИЗВЕДЕНИЕ ВЕКТОРОВ.
![]()
![]() x1 y1
x1 y1
Пусть х= х2 и у= у2 два вектора в трех мерном
x3 y3
пространстве. Скалярным произведением этих векторов называют скалярную величину:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() (11) хTу=уTх=х1у1+х2у2+х3у3
(11) хTу=уTх=х1у1+х2у2+х3у3
Нормой или длинной вектора х в евклидовом пространстве называют число:
(12) х = х =(хTх)½ , где х -норма вектора х.
Линейное пространство в котором определено скалярное произведение называется евклидовым пространством.
БАЗИС ЛИНЕЙНОГО ПРОСТРАНСТВА.
Пусть имеем систему векторов
(13) х1, х2, х3,..., хn
Базисом (базой) системы векторов (13) называется такая линейно-независимая ее подсистема, через которую линейно выражаются все указанные векторы.
УГОЛ МЕЖДУ ВЕКТОРАМИ. ОРТОГОНАЛЬНЫЕ ВЕКТОРЫ.
![]()
![]() Пусть х=(х1, х2) и у=(у1, у2) - два вектора на плоскости. Выберем систему координат так, чтобы ось абсцисс совпадала с направлением вектора х, так что x1= x , х1 =0 (рис.3)
Пусть х=(х1, х2) и у=(у1, у2) - два вектора на плоскости. Выберем систему координат так, чтобы ось абсцисс совпадала с направлением вектора х, так что x1= x , х1 =0 (рис.3)
![]() 2
2
![]()
![]()
 y2 y
y2 y
![]() α
x
α
x
![]()
![]() y1 1
y1 1
![]()
![]()
![]()
![]() обозначим через угол α между векторами х и у при этом
обозначим через угол α между векторами х и у при этом
хTу=х1у1+х2у2= х * у cosα
Угол между векторами определяется:
![]()
![]()
![]()
![]() α=arccos(xTy/ x y )
α=arccos(xTy/ x y )
при │х│=1 скалярное произведение хTу определяет проекцию вектора у называется ортогональным, если угол между ними равен 90○, т.е.
если хTу=0.
МАТРИЦЫ И ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ.
ПОНЯТИЕ МАТРИЦ.
Матрицей А размером m*n называют таблицу, содержащую m-строк и n-столбцов, элементами которой являются вещественные или комплексные числа
 a11 .......... a1n
a11 .......... a1n
A= ...................... =[aij]
am1 .......... amn
Если m=n, то матрицу называют квадратной.
Матрицы А=[аij] и В=[вij] равны (А=В) в том и только в том случае, если имеют один и тот же размер аij=вij для всех ij.
Преобразованием линейного n-мерного пространства Х называют оператор А, отображающий это пространство в m - мерное линейное пространство Y:
(1) А:Х→Y
Таким образом, преобразование А ставит в соответствие каждому вектору х пространства Х вектор
(2) Y=А-х, пространства Y.
Преобразование А называют линейным, если выполняется условие:
(3) А(х1+х2)=Ах1+Ах2, А(ℷхi)=ℷАх
Условие (3) будет выполнятся, если между компонентами хi и уj векторов х и у имеется линейная зависимость вида:
n ___
(4) у(i)= ∑ aijx(j), i=1,m ,где аij - произвольное число
j=1 ____ ___
Совокупность чисел аij, i=1,m; ;j=1,n образуют матрицу:
 a11......a1n
a11......a1n
A= ................ = [aij]
am1......amn

 которую называют матрицей линейного преобразования.
которую называют матрицей линейного преобразования.
у=Ах можно записать в виде умножения матрицы на вектор:
y(1) a11......a1n x(1)
(5) .... = ............... * .....
y(n) am1......amn x(n)
ОПЕРАЦИИ НАД МАТРИЦАМИ. УМНОЖЕНИЕ МАТРИЦЫ НА ЧИСЛО.
Пусть А матрица линейного преобразования Ах, α- число.
(6) αА=[α аij ]
При умножении матрицы А на число α все ее члены умножаются на это число.
СУММА МАТРИЦ.
Пусть у=Ах и v=Вх - два линейных преобразования с матрицами А=[aij] и В=[вij] размером m*n.
Рассмотрим новое линейное преобразование, ставшее в соответствие каждому вектору х∈Х вектор у+v∈Y
(7) у+v=Ах+Вх=(А+В)х
Преобразование (А+В)х называют суммой линейных преобразований Ах и Вх, или:
(8) А+В=[aij]+[вij]
При сложении двух матриц одинакового размера получается новая матрица того же размера, элементы которой равны сумме элементов складываемых матриц.
ПРОИЗВЕДЕНИЕ МАТРИЦ.
Пусть X,Y,Z-линеиные пространства размерностью m, r, n и пусть у=Вх, z=Ау - линейные преобразования пространства Х в пространство Y, и пространства Y в пространство Z, где В=[вkj] и A=[aik] матрицы размером m*k и k*n соответственно. Произведением преобразований Ау и Вх называют новое линейное преобразование Сz.
(9) Z=Cx=A(Bx)=ABx
Матрицу С=АВ размером n*n называют произведением матриц А и В.
n ___ ___
(10) Сij= ∑ аikвkj , i=1,n , j=1,m
k=1
Согласно (10) элемент Сij матрицы С представляет собой скалярное произведение i-й строки матрицы А на j-й столбец матрицы В, так что произведение матриц АВ символически может быть представлено в виде:
 a11...a1k в11...в1m
a11...a1k в11...в1m
(11) АВ= ............ * .............
an1...ank вk1....вkm
ТРАНСПОНИРОВАНАЯ МАТРИЦА.
Пусть А=[aij] - матрица размером m*n. Матрица АT=[а'ij] размером m*n, строки которой являются столбцами матрицы А, столбцы строками матрицы А.
Элемент а'ij матрицы АT определяют по элементам аij матрицы А из соотношения:
(12) а'ij=аji
ОСОБЕННОСТИ КВАДРАТНЫХ МАТРИЦ.
В квадратной матрице число строк равно числу столбцов.
Определителем квадратной матрицы называют, определитель составленный из элементов aij этой матрицы и обозначают det A.
Определитель det A обладает следующими свойствами:
1) при умножении на ℷ любого столбца матрицы А определитель det A умножается на ℷ;
2) перемена местами двух соседних столбцов меняет знак det A на противоположный;
3) если любые два столбца матрицы равны между собой, то det A=0;
4) добавление к любому столбцу матрицы любого другого столбца, умноженного на произвольный скалярный множитель, оставляет det A неизменным;
5) если столбцы матрицы линейно зависимы, то det A=0;
ТЕОРЕМА ГАМИЛЬТОНА-КЕЛЛИ.
Каждая квадратная матрица является корнем своего характеристического уравнения.
(13) det (A-ℷI)=a0ℷn+a1ℷn-1+...+an-1ℷ an=0
(14) a0An+a0An-1+an-1A+anI=0[n*n]
ОБРАТНАЯ МАТРИЦА.
Матрицей, обратной по отношению к квадратной матрице А размером n*n, назовем такую матрицу А-1 того же размера, для которой справедливо соотношение:
(15) А*А-1=А-1*А=Е
Пусть у=Ах - линейное преобразование с квадратной матрицей А=[xij]. Обратным преобразованием называют преобразование х=А-1у. Матрицу А-1 этого преобразования называют обратной по отношению к матрице А.
(16) А-1=(1/detA) [Aij]T , где Аij - алгебраическое
дополнение элемента а в определителе матрицы.
Система уравнений Ах=у называется определенной и имеет единственное решение, если detA≠0. Матрица А, для которой выполнено это условие, называют невырожденной.
ДИАГАНАЛИЗАЦИЯ МАТРИЦ.
Вид квадратной матрицы А линейного преобразования у=Ах, может быть изменен без изменения характеристического уравнения этой матрицы путем использования преобразования подобия.
Пусть А - квадратная матрица; С - произвольная невырожденная матрица. Преобразованием подобия называют преобразование:
(17) В=С-1*А*С
Преобразование подобия позволяет приводить некоторые виды квадратных матриц к диагональной форме, являющейся наиболее удобным видом матрицы.
 ℷ1 0 0
ℷ1 0 0
(18) diag[ℷ1 ℷ2 ......ℷn ]= 0 ℷ2 0
0 0 ℷn
Нормой матрицы А размер m*n называется сумма модулей ее элементов:
m n
(19) │А│= ∑ ∑ │a ij │
i=1 j=1
При решении задач удобно ввести матрицы, элементы которых являются функциями независимой переменной t.
Эти матрицы имеют вид:
 a11(t) a12(t) ...... a1n(t)
a11(t) a12(t) ...... a1n(t)
(20) А(t)= a21(t) a22(t) ...... a2n(t)
............................
am1(t) am2(t) ..... amn(t)
и называются функциональными матрицами.
Производной матрицы А(t) по независимому переменному называется матрица А(t) вида:

da11(t)/dt da12(t)/dt ...... da1n(t)/dt
(21) А(t)= dA(t)/dt = ............................................................. =
dam1(t)/dt adm2(t)/dt ...... damn(t)/dt
=[daij(t)/dt]
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев