Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
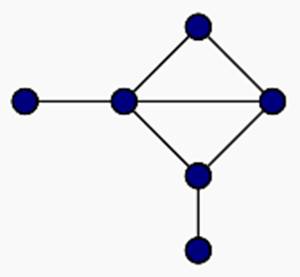
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
1.4 ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
ВРЕМЕНЕМ.
Дифференциальные уравнения состояния:
(1) Ś(t)= A(t)S(t)+B(t)U(t)
(2) у(t)= C(t)S(t)+D0(t)U(t)+D1(t)U(1)(t)+...+Dк(t)U(к)(t)
Коэффициенты этих уравнений являются матрицами.
A- матрица состояний [n*n]
B- матрица входа [m*n]
C- матрица выхода [L*m]
D- проходная матрица [L*m]
Пусть А- непрерывная система, заданная уравнением входа-выхода вида:
Lу+Kŷ=Mu, где L,K,M- матричные дифференциальные операторы с постоянными коэффициентами, u,у - входной и выходной векторы, а ŷ -скрытый выходной вектор.
Соотношения вход - выход-состояние.
В процессе установления соответствия вектора состояния с системой и связанного с этим определения соотношения вход - выход-состояние системы, описываемой дифференциальными уравнениями, состоит в нахождении общего решения этого дифференциального уравнения.
(2) L(p)y=u, L(p)=anpn+...+a0, an≠0, которое описывает R.
Решить дифференциальное уравнение можно с помощью методов, хорошо известных из теории обыкновенных дифференциальных уравнений. Однако будет удобно основываться не на классической теории, а получить общее решение сразу, путем преобразования Лаплпса.
Пусть R- система, описываемая соотношением вход-выход (2), тогда выражение для общего решения будет иметь вид:
n t
(3) y(t)= ∑ y(ℷ-1)(t0-)Фℷ(t-t0)+ ⌡ h(t-ℰ)U(ℰ)dℰ t≥t0,
ℷ=1 t0
где h(t)=Z {1/L(S)}= импульсной реакции R
(4) H(S)=1/L(S)= передаточная функция R,
Фℷ=Z-1{(anSn-ℷ+...+aℷ)/L(S)}, ℷ=1,...,n
Функции времени Ф1,...,Фn линейно независимы и удовлетворяют дифференциальному уравнению
L(p)Фℷ(t)=0, ℷ=1,...,n
На втором этапе необходимо отождествить постоянные ai, i=1,..,n из уравнения (2) с составляющими вектора x(t0-) - состояние R в момент времени t0-.
Положим базисные функции, или точнее говоря их преобразования по Лаплпсу, равными:
Sn-1/L(S),...,S/L(S),1/L(S)
В этом случае составляющим x(t0) будет:
(5) x1(t0-)=any(t0-),
x2(t0-)=any(n-1)(t0-)+a1y(t0-)
....................................................
xn(t0-)=any(n-1)(t0-)+...+an-1y(t0-)
Заменяя начальные значения y(ℷ-1)(t0-) в (3) через их выражения, представленные с помощью составляющих x(t0-), получим для общего решения (3)
t
(6) y(t)=<(t-t0),...,x(t0-)>+ ⌡ h(t-ℰ)U(ℰ)dℰ, t≥t0
t0
где h- импульсная реакция R
Ф(t)=(Ф1(t),...,Фn(t)); составляющие которого суть базисные функции:
Фℷ(t)= Z-1{ (anℷn-1+...+ aℷ)/L(S) },
а <Ф(t-t0), x(t0-)> обозначает скалярное произведение базисного
вектора Ф(t-t0) и начального вектора состояния x(t0-).
Уравнение (6) является соотношением вход - выход-состояние для R.
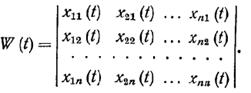
ФУНДАМЕНТАЛЬНАЯ МАТРИЦА.
Будем исследовать реакцию при нулевом входе и вынужденную реакцию систем, описываемых уравнением вида:
(11) x(t)= A(t)x(t)+B(t)U(t), где
A(t)- квадратная матрица порядка n, элементами которой являются функции, непрерывные для всех значений t; B(t)-непрерывная матрица размером [n*r]; x(t) - вектор состояния, U- вход.
Пусть A(t) есть квадратная матрица порядка n, элементы которой - непрерывные функции. Тогда решение матричного дифференциального уравнения:
(12) X= A(t)X(t), X(t0)=C, где
C есть произвольная постоянная матрица, имеет следующий вид:
(13) X(t)= (t,t0)C
Любая неособенная матрица, которая удовлетворяет матричному дифференциальному уравнению (12), называется фундаментальной матрицей системы (11). Таким образом, любая фундаментальная матрица имеет вид (13) при некоторой неособенной матрице С n строк любой фундаментальной матрицы есть n линейно независимых решений для уравнения (11).
th. Пусть A(t) есть квадратная матрица порядка n, элементы которой непрерывные функции времени. Пусть Ф(t,t0) есть также квадратная матрица порядка n, которая является решением уравнения
(14) d/dt Ф(t,t0)=A(t)Ф(t,t0), (t,t0)=I
Тогда решение уравнения
(15) x(t)= A(t)x(t), x(t0)=x0,
обозначаемое через x(t,x0,t0), есть
(16) x(t,x0,t0)=Ф(t,t0)x0 ∀t, ∀x0
Матрица Ф(t,t0) называется переходной матрицей состояния.
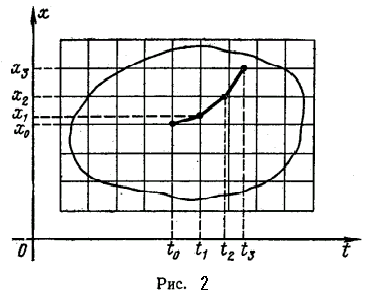
Из уравнения (16) можно сказать: матрица Ф(t,t0) есть
линейное преобразование, которое отображает состояние x0 в момент времени t0 в состояние x(t) в момент t.
СПОСОБЫ ВЫЧЕСЛЕНИЯ МАТРИЧНОЙ ЭКСПОНЕНТЫ.
t
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев