Основные параметры процесса, несмотря на воздействие возмущения, должны стабилизироваться или изменяться согласно заданию
ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА
ОБЪЕКТЫ УПРАВЛЕНИЯ С НЕПРЕРЫВНЫМ
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
ОБЪЕКТЫ УПРАВЛЕНИЯ С ДИСКРЕТНЫМ ВРЕМЕНЕМ
СТРУКТУРНЫЕ СВОЙСТВА ОБЪЕКТОВ УПРАВЛЕНИЯ
МОДЕЛИ СЛУЧАЙНЫХ СИГНАЛОВ
Сложение случайных функций
ОПТИМИЗАЦИЯ В ТЕОРИИ СИСТЕМ
ЗАДАЧИ И МЕТОДЫ ЛИНЕЙНОГО ПРГРАММИРОВАНИЯ
Навигация
Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
Математические основы теории систем
96339
знаков
12
таблиц
7
изображений
1. Если всех t ⌡ A(Ʈ)dƮ и A(t) коммутативны, то
t0
 t
t
Ф(t,t0)= exp ⌡ A(Ʈ) dƮ
t0
Пусть Ф(t,t0) переходная матрица для (11),определяемой выражением (14), тогда:
 t
t
(17) det Ф(t,t0)= exp ⌡ a(Ʈ) dƮ , где
t0
n
a(Ʈ) ≜ ∑ aiƮ(Ʈ) ≜ trA(Ʈ).
i=1
2. Законченное решение позволяет получить формула интерполяции Лагранжа-Сильвестра. Она применима к матричным функциям, которые могут быть представлены в виде (сходящихся) степенных рядов.
∞
f(A)= ∑ CiAi ,где
0
матрица А с n отличающимися друг от друга собственными значениями соответствующих формуле интерполяции Лагранжа для аппроксимации функций с помощью многочленов. Матрица перехода Ф=exp{At} представляет такой степенной ряд
n
(18) Ф(t)= eAt= ∑ eℷitFi , где
i=1
n
F=П (A-ℷiI)/(ℷi-ℷj)
j=1
j≠i
3. Применение преобразования Лапласа к однородному дифференциальному уравнению вида q=Aq, позволяет получить формулу, похожую на формулу Сильвестра, которую можно использовать не только для случая с простыми корнями.
∞
(19) Ф(t)= eAt≜ ∑ Aiti/i!= I+At+A2t2/2!+...
i=1
Эта формула особенно пригодна для аналитических исследований.
4. С помощью преобразования подобия матрица с n совершенно различными корнями ℷi может быть приведена к диагональной матрице Л.
Решение относительно А дает.
(20) A= KЛK-1 ,где
К - матрица собственных векторов, K≜[K1,K2,...,Kn], согласно выводу из теории матриц имеет:
для двух подобных матриц А и, Л соответствующих уравнению (20), справедливо
f(A)=Kf(Л)K-1
(21) Ф(t)=KeЛtK-1
причем, если известны корни ℷi, сразу можно записать матрицу exp{Лt}
 eℷ1t......0
eℷ1t......0
eЛt=
0......eℷnt
Рассмотренные способы дают решение в аналитическом виде и требуют больших затрат времени на определение собственных значений матрицы А, т.е. корней характеристического уравнения. В приведенных ниже способах оба этих момента отсутствуют.
5 При расчете матрицы перехода с помощью формулы Тейлора из (19)
p-1
(22) Ф(t)= ∑ Ai ti/t!+Rp
i=0
в системах с сосредоточенными параметрами для отдельных элементов матриц получим полиномы в функции t, которые могут быть записаны в виде сумм показательных функций e.
6. Путем программирование на аналоговой вычислительной машине элементы матрицы перехода могут быть получены в виде кривых, численно оценены или аналитически аппроксимированы.
Модуль вход-выход непрерывного объекта управления в форме векторно-матричного дифференциального уравнения
вектор входа U=[U1, U2,...,Um]T
вектор выхода x=[x1,x2,...,xm]T
вектор состояния q=[q1,q2,...,qm]T
Уравнение состояния (векторное дифференциальное уравнение)
(23) q(t)= Aq(t)+Bu(t)
Уравнение входа
(24) x(t)= Cq(t)+Du(t)
Для одномерной системы n-го порядка эти уравнения упрощаются:
(25) q(t)=Aq(t)+bu(t)
(26) x(t)=CTq(t)+du(t)
![]()
![]()
![]() (27) q1 = a11 a12 q1 + b1 U; при n=2
(27) q1 = a11 a12 q1 + b1 U; при n=2
q2 a21 a22 q2 b2
![]() (28) x=|C1 С2|
q1 + dU
(28) x=|C1 С2|
q1 + dU
q2
Таким образом, векторное дифференциальное уравнение (25) служит компактной формой записи для системы из n скалярных дифференциальных уравнений первого порядка
(29) q = a11q1+a12q2+b1U;
q = a21q1+a22q2+b2U.
Уравнение входа для одномерной системы представляет собой скалярное алгебраическое уравнение
(30) x= c1q1+c2q2+dU
ВЕСОВАЯ ФУНКЦИЯ.
Прежде всего нужно определить выходной сигнал xv(t), соответствующий входному сигналу Uv(t)
(31) Uv(t)=U(V)dV δ(t-V)
U(V)dV - площадь импульса
δ(t-V)- единичный импульс при t=V
Соответствующий этому выходной сигнал представляет реакцию на импульсное воздействие, или соответственно весовую функцию g(t-V), характеризуемую импульсами площадью U(V)d .
Если уравнения системы представлены в стандартной форме записи (23), (24), то можно использовать общую форму решения уравнения переходного процесса:
t
(32) q(t)= Ф(t)q(0)= ⌡ Ф(t-Ʈ) BU(Ʈ)dƮ= qсв(t)+qпрн(t)
0
В рассматриваемом здесь случае переходного процесса при
возмущающем воздействии и нулевых начальных условиях для выраженного в относительных единицах входного сигнала Uδ
Uδ(t)=δ(t)
получим характеристику состояния в относительных
t
(33) qδ(t)= ⌡ Ф(t-Ʈ) bδ(Ʈ) dƮ
0
Для импульса δ(Ʈ), возникающего в момент времени Ʈ=0, интервал интегрирования должен быть принят от -0
![]() Ф(t)b , при t≥0
Ф(t)b , при t≥0
(34) qδ(t)=
0, при t<0
Весовую функцию находят путем подстановки (34) в уравнение выхода (26)
(35) q(t)=xδ(t)=CTqδ(t)+dUδ(t)= CTФ(t)b+dδ(t) при t≥0
Для определения элементарного выходного сигнала xδ(t), соответствующего уравнению (31), нужно учесть еще смещение входного импульса по времени и его интенсивность (площадь).
(36) xv(t)=U(V) dV g(t-V)=U(V) dV[CTФ(t-V)b+dδ(t-V)]
![]()
![]()
![]()
 U(t)=U(V)dV δ(t-V)
U(t)=U(V)dV δ(t-V)
U
![]() x(t)=U(V)dVq(t-V)
x(t)=U(V)dVq(t-V)
![]()
![]()
![]() V
Ʈ=t-V
V
Ʈ=t-V
![]() t
t
Элементарный входной и выходной сигналы при разложении на импульсы.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ И ИХ СВОЙСТВА.
Пусть система A линейна и стационарна и пусть h(*) является ее импульсной реакцией.
Предположим, что существует преобразование Лапласа для h. Тогда это преобразование
∞
(37) H(S) ≜ ⌡ e-st h(t) dt
-∞
называется передаточной функцией H системы A.
Передаточная функция является оператором, характеризующим передачу сигнала линейным передаточным звеном, путем умножения которого, на изображении входного сигнала получается преобразованный
входной сигнал звена, имевшего до этого рабочую точку q=0.
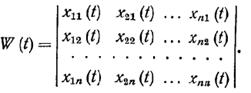
В случае системы со многими входами и выходами передаточная функция становится матричной передаточной функцией H(S);
ее (i,j)- представляет собой преобразование Лапласа для hij(t), т.е. для установившегося режима i-го выхода на единичный импульс, приложенный к j-му входу в момент t=0.
Пусть - линейная стационарная система, и пусть H(S)- ее передаточная функция. Если y является реакцией системы при нулевом состоянии на входе воздействия U, то
(38) Y(S)= H(S) V(S)
где Y и V - преобразования Лапласа для y и U.
Передаточная функция H(S) идентична весовой функции g(t), преобразованной по Лапласу.
Похожие работы
... D=1- W3W4(W1W5W6+ W7+ W1W8+ W2W6 W7+ W2W7+2W2W8+ 1)+ W5W6(W3W4(W7+ W1W5W6+ W2W7+ W2W8+1)-1) Для x1 Для x4 Для y Для х13 Задание 2. Синтез комбинационных схем. 2.1 Определение поставленной задачи Устройство, работа которого может быть представлена на языке алгебры высказываний, принято называть логическим. Пусть такое устройство имеет n ...
... противоположные подходы, но нельзя считать ни один из них "юридически законным" или вытекающим из каких ни будь законов природы, нельзя считать стиль управления системой на основе системного анализа "правильным", "современным", "куль-турным". Другое дело — не знать о возможности применения системного подхода к вопросам управления — вот это неправильно, некультурно. Пример системного подхода ...

... в момент t, образует пространство выхода системы. Множество всех значений, которые может принять вектор состояния x в момент t, образует пространство состояний системы. 3.3. Описание непрерывных систем с помощью системы дифференциальных уравнений В любой момент времени t состояние системы является функцией начального состояния x(t0) и вектора входа m(t0, t), то есть x(t)=F[x(t0); m(t0; t)], ...
... Рассела и во многом базируется на работе Бертрана Рассела и Альфреда Уайтхэда «Principia Mathematica» (этот фундаметальный трёхтомник математической логики до сих пор не издан на русском языке)[8]. Заключение Прародителем информатики является кибернетика, основанная американским математиком Норбертом Винером, опубликовавшим в 1948 году одноименную книгу. Основоположником ...
0 комментариев