Основные типы локальных регуляторов
Системы на переменном токе
Управляемость систем
Разностные уравнения
Преобразование Лапласа непрерывных функций
Математические модели систем управления в пространстве состояний
Интегрирующее звено
Дифференцирующее звено второго порядка
Неустойчивое периодическое звено
Неминимально-фазовое дифференцирующее звено первого порядка
Звено чистого запаздывания
Решение уравнения состояния
Передаточная функция
Переходная функция
Дискретная передаточная функция импульсной системы с экстраполятором нулевого порядка
Частотные характеристики
Дискретные системы
Дискретные системы
Навигация
Основные типы локальных регуляторов
Управление сложными системами
55819
знаков
37
таблиц
113
изображений
3.2.2 Основные типы локальных регуляторов
Множество локальных регуляторов можно упорядочить по различным признакам:
Во-первых, в зависимости от характера информации, используемой в регуляторе:
1.) С регулированием по разомкнутому циклу (по возмущениям).
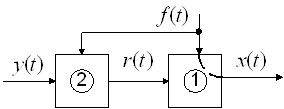
Проблема состояла в определении регулирующего воздействия.
Здесь регулятор настраивается в зависимости от основного возмущения ![]() .
.
“+”: высокое быстродействие, так как регулятор настраивается сразу по возмущению, а не так, как в случае регулирования по замкнутому циклу.
“–”: трудность программирования регулятора на возможные возмущения, следовательно, невысокая точность.
2.) С регулированием по замкнутому циклу (по отклонениям).
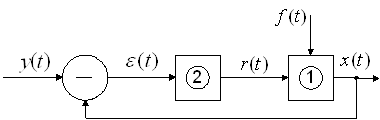
“+”: в независимости от причин появления ошибки ![]() , система работает по принципу её (ошибки) компенсации.
, система работает по принципу её (ошибки) компенсации.
“–”: быстродействие ниже, чем в случае с регулированием по разомкнутому циклу.
3.) С регулированием по комбинированию.
Объединение случаев регулирования по разомкнутому циклу и по замкнутому циклу.
Во-вторых, в зависимости от уставки ![]() :
:
1.) Системы стабилизации ![]() .
.
2.) Программные системы ![]() , причём
, причём ![]() — известно.
— известно.
3.) Следящие системы ![]() , причём
, причём ![]() — заранее неизвестная функция.
— заранее неизвестная функция.
В-третьих, в зависимости от размерности n вектора состояния ![]() :
:
1.) Одномерные n = 1.
2.) Двумерные n = 2.
3.) Многомерные n = 3.
В-четвёртых, в зависимости от количества контуров в системе:
1.) Одноконтурные (используется только главная обратная связь, нет местных связей).
2.) Двухконтурные (используются одна главная и одна местная обратные связи).
3.) Многоконтурные (используются одна главная и много местных обратных связей).
В-пятых, в зависимости от установившегося значения ошибки:
1.) Статические ![]() .
.
2.) Астатические ![]() .
.
Систему называют астатической по управляющему (или возмущающему) воздействию, если при подаче на вход постоянного управляющего (или возмущающего) воздействия ошибка в установившемся состоянии не зависит от величины этого воздействия и равна нулю.
Сравнить рисунки 24 и 26 методических указаний.
В-шестых, в зависимости от характеров сигналов, циркулирующих в системе:
1.) Непрерывные.
2.) Импульсные.
3.) Релейные.
4.) Релейно-импульсные (кодово-импульсные).
5.) На переменном токе (с гармонической модуляцией).
1.) В непрерывных системах сигналы могут быть описаны непрерывными во времени функциями.
3.2.2.1 Импульсные системы
Эти системы содержат импульсные устройства (2), осуществляющие квантование сигналов по времени (АИМ).
Типовая структура импульсных систем:
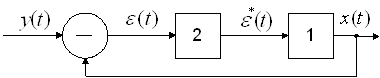
1 — непрерывная часть системы.
Импульсное устройство (ключ), замыкаясь в дискретные равноотстоящие моменты времени (t = i∙T, i = 0, 1, 2, …, где i — период повторения, а T — период дискретности), преобразует непрерывный входной сигнал ![]() в дискретный
в дискретный ![]() .
.
Реальный ключ (2) удобно условно представить в следующем виде:
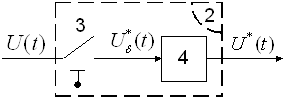
3 — идеальный ключ; 4 — формирователь.
Лекция №4. 19.02.2003
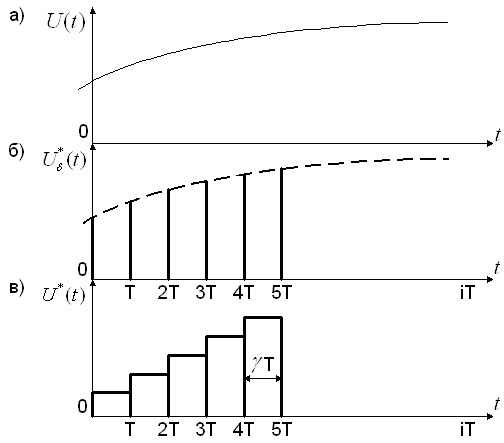
Идеальный ключ (3) преобразует непрерывный сигнал ![]() (рисунок а)) в последовательность идеальных импульсов типа δ-функций (рисунок б)), далее эта последовательность поступает на формирователь (4).
(рисунок а)) в последовательность идеальных импульсов типа δ-функций (рисунок б)), далее эта последовательность поступает на формирователь (4).
Формирователь (4) преобразует эту последовательность в реальные импульсы определённой формы, длительности (γT, 0<γ≤1) и амплитуды (рисунок в)).
При запоминании на интервале дискретности T при γ = 1 формирователь (4) называют Экстраполятором Нулевого Порядка (Э0П).
Математическая модель Э0П непрерывна и может быть отнесена к непрерывной части системы. В результате типовая структура импульсной системы примет вид:
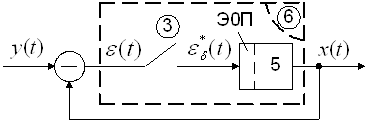
Рисунок № !
5 — приведенная непрерывная часть;
6 — импульсный фильтр
3.2.2.2 Релейные системы
Релейные системы содержат в своей структуре устройства (реле), осуществляющие квантование сигнала по уровню. В результате, на выходе реле сигнал будет непрерывным, но ступенчатым
3.2.2.3 Релейно-импульсные системы
В них происходит квантование сигналов по времени и по уровню.
К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК.
При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным.
Похожие работы
... существует внутренний механизм целеполагания. Наука, которая первой начала исследование подобных систем, получила название кибернетики. Кибернетика Кибернетика (от греч. kybernetike - искусство управления) — это наука об управлении сложными системами с обратной связью. Она возникла на стыке математики, техники и нейрофизиологии, и ее интересовал целый класс систем, как живых, так и неживых, ...
... действие внутренних тенденций, и система сама построит необходимую структуру. Нужно только знать потенциальные возможности данной среды и способы их стимуляции. В основе синергетического подхода к управлению социальными системами – механизм резонансных направляющих воздействий на нелинейную систему, в ходе развития которой всегда существует область параметров и стадий, в рамках которых нелинейная ...
... полномочий. Оперативность структуры означает возможность реакции системы на изменения обстановки, временные показатели этой реакции и ее цену. Типичным примером организации как сложной системы является производственно-экономическая система (ПЭС). Основным видом производственно-экономических систем является предприятие. Приведем, применительно к промышленному предприятию, некоторые необходимые ...

... , учитывая, что окружение будет меняться. Смысл стратегического управления в определении и осуществлении действий предприятия в настоящее время для обеспечения достойного будущего, а не разработка действий, которые будет осуществлять организация в дальнейшем. 1.2 Особенности стратегического подхода к управлению Стратегический подход к управлению не является идеальным решением дальнейшего ...
0 комментариев