ФОРМУЛИРОВКА ЗАДАНИЯ И ЕГО ОБЪЕМ
Определение продольных уклонов
Определение нормативных радиусов для проектирования кривых в плане
Определение наименьших радиусов вертикальных кривых для сопряжения переломов продольного профиля
Определение ширины проезжей части дороги и земляного полотна
Проектирование плана трассы автомобильной дорог
Проектирование виража
Проектирование уширения проезжей части на кривых
Определяются чёрные отметки точек начал, вершин и концов вертикальных кривых
Определение требуемого модуля упругости
Конструирование дорожной одежды
Расчет по допускаемому упругому прогибу ведется послойно, начиная с подстилающего грунта. Рекомендуется подсчет вести используя таблицу 23
Оценка транспортно-эксплуатационного состояния дороги
Оценка пропускной способности дороги
Оценка безопасности движения на участке дороги
Содержание участка автомобильной дороги
Обустройство участка автомобильной дороги
Определение экономической эффективности мероприятий по совершенствованию участка автомобильной дороги
ОБЩИЕ ТРЕБОВАНИЯ К КУРСОВОМУ ПРОЕКТУ
Навигация
Определение нормативных радиусов для проектирования кривых в плане
Проектирование автомобильных дорог
110943
знака
40
таблиц
19
изображений
3.2.3 Определение нормативных радиусов для проектирования кривых в плане
Радиус кривой в плане, при котором возможно движение автомобиля с расчетной скоростью при условии устройства виража, переходных кривых и уширения проезжей части, определяется по формуле:
 , (16)
, (16)
гдеV – расчетная скорость движения для данной категории дороги, км/ч;
iв – поперечный уклон проезжей части на вираже (принимается в соответствии с требованиями СНиП 2.05.02-85, табл. 8);
μ – коэффициент поперечной силы, принимаемый по графику (рисунок 2).
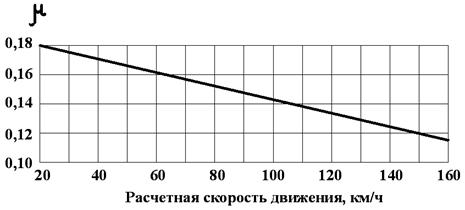
Рисунок 2 – График зависимости коэффициента поперечной силы от скорости движения автомобиля [1]
Значение коэффициента поперечной силы µ должно удовлетворять одновременно условиям устойчивости автомобиля против опрокидывания, устойчивости против заноса, удобства пассажиров при проезде по кривой и экономичности работы автомобиля.
Рекомендуется для определения радиуса, не требующего переходных кривых и виража, принимать для дорог I и II категорий µ=0,05 и для дорог III категории (и ниже) – µ=0,1.
При определении наименьшего радиуса, применяемого на трудных участках, в зависимости от сложности вписывания кривой может быть допущена величина μ=0,15 – 0,20. При сравнительно простых условиях проектирования следует принимать μ=0,10, особенно для дорог высокой категории.
По условию видимости в ночное время минимальный радиус кривой вычисляется по формуле:
![]() , (17)
, (17)
гдеS1 – расстояние видимости поверхности дороги, определенное по СНиП 2.05.02-85 (табл. 10) для заданной расчетной скорости движения, м;
α – угол расхождения пучка света фар (α ≈ 2°).
Наименьшие радиусы кривых в плане без устройства виража рассчитываются по формуле:
 , (18)
, (18)
гдеi1 – поперечный уклон проезжей части, ‰ (определяется по СНиП 2.05.02-85, табл. 7).
Вычисленные радиусы кривых в плане сравниваются с приведенными в СНиП 2.05.02-85.
3.2.4 Определение расстояний видимости
В теории проектирования дорог предложено несколько схем видимости по условиям движения автомобилей и расположению автомобилей и препятствий на дороге. Принципиально различают следующие группы:
1. Схемы, предусматривающие остановку автомобиля перед препятствием или встречным автомобилем.
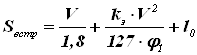
Расчетное расстояние видимости поверхности дороги находится из выражения:
 . (19)
. (19)
гдеV – расчетная скорость движения по проектируемой автомобильной дороги;
Кэ – коэффициент, учитывающий эффективность тормозов (для легкового автомобиля принимается К=1,3; для грузовых и автобусов – К=1,85);
φ1 – коэффициент продольного сцепления, принимается равным 0,50;
l0 – зазор безопасности, принимаемый равным 5 – 10 м.
Расчетное расстояние видимости встречного автомобиля находится по формуле:
 . (20)
. (20)
2. Схемы, исходящие из объезда автомобилем препятствия или обгона попутного автомобиля с заездом на смежную полосу движения.
Расстояние видимости из условия обгона:
 . (21)
. (21)
гдеV1 и V2 – соответственного скорости обгоняющего и обгоняемого автомобиля. Для расчетов принимаются расчетные скорости для легкового и грузового автомобилей при принятой технической категории;
lа – средняя длина автомобиля, м, принимается 5 – 7 м.
На пересечениях дорог в городских условиях необходимо обеспечение достаточной боковой видимости придорожной полосы.
Минимальное необходимое расстояние боковой видимости:
 , (22)
, (22)
гдеVп – скорость движения пешехода или транспортного средства по пересекающей дороги, км/ч, для пешехода – 7 – 10 км/ч, для транспортного средства – 20 – 30 км/ч.
Расстояния боковой видимости на пересечении дорог сравнивают с расчетными, которые определяют с учетом скоростей движения на пересекающихся дорогах, продолжительности ориентирования водителя и времени его реакции:
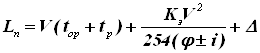 , (23)
, (23)
гдеV – скорость движения;
tор – продолжительность ориентирования водителя, с;
tр – время реакции водителя, равное 1,5 с;
Кэ – характеристика эксплуатационного состояния тормозной системы автомобиля (принимается не менее 1,4);
j – коэффициент продольного сцепления;
i – продольный уклон (при спуске – с минусом);
D – расстояние от остановившегося автомобиля до кромки проезжей части пересекаемой дороги: D = 5 м.
Продолжительность ориентирования рассчитывают с учетом местных условий движения:
![]() , (24)
, (24)
гдеto – наименьшая продолжительность ориентирования в оптимальных условиях (для автомобильных дорог to = 1,4 с, для населенных пунктов 1,8 с);
К1 – коэффициент, учитывающий наличие стоящих на обочинах пересекаемой дороги автомобилей (если остановка или стоянка автомобилей в пределах пересечений разрешена, то К1=0,32; при запрещении остановки К1=0);
К2 – коэффициент, учитывающий плотность движения на пересекаемой дороге:
| Интенсивность движения по пересекаемой дороге, авт./ч | до 50 | 75 | 200 | 500 |
| К2 | 0,15 | 0,22 | 0,35 | 0,53 |
К3 – коэффициент, учитывающий интенсивность движения на дороге, с которой определяется расстояние боковой видимости:
| Интенсивность движения, aвт./ч | до 30 | 50 | 100 | 300 |
| К3 | 0 | 0,12 | 0,20 | 0,22 |
Вычисленные расстояния видимости сравниваются с приведенными в СНиП 2.05.02-85.
Похожие работы

... природных условий Российской Федерации не допускает использования типовых проектов и трафаретных решений. Поэтому от проектировщиков прежде всего требуются творческий подход к проектированию автомобильных дорог, умение находить технически правильные и экономически целесообразные инженерные решения. 1. Народное хозяйство и природно-климатические условия проектирования. Область расположена ...
... Из ведомости дорожных знаков. По заданию перспективная интенсивность движения 3960 авто/сутки. В соответствии с требованиями СНиП 2.0502-85 проектируемая автомобильная дорога отнесена к II категории. Таблица основных норм проектирования автомобильной дороги № п/п Показатели По СНиП По проекту 1 Расчёт интенсивности авто/сут. 3000-7000 3960 2 Расчёт скорости движения км/ч. ...
... грузовых автомобилей и 67,2 процента автобусов транспорта общего пользования. 2. ТЕХНИЧЕСКИЕ НОРМАТИВЫ НА ПРОЕКТИРОВАНИЕ 2.1 Общие требования Если позволяют условия проложения трассы, независимо от категории автомобильной дороги необходимо при назначении элементов плана и продольного профиля руководствоваться рекомендациями п.4.20 СНиП 2.05.02 – 85, которые приведены в таблице 1. На ...

... народного хозяйства при выполнении установленного планом объема). Экономический эффект этого направления определяют с использованием цен, себестоимости ресурсов и материалов, от стимулирующего воздействия автомобильных дорог на сферу материального производства, выражающегося в приросте чистой продукции. 3. Экономический эффект в социальной сфере, сокращение потерь от дорожно-транспортных ...
0 комментариев