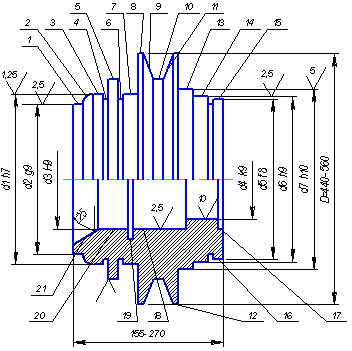
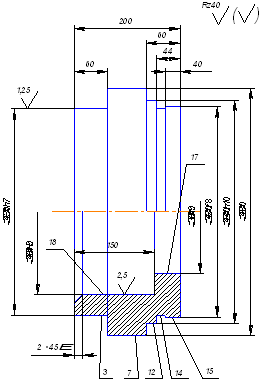
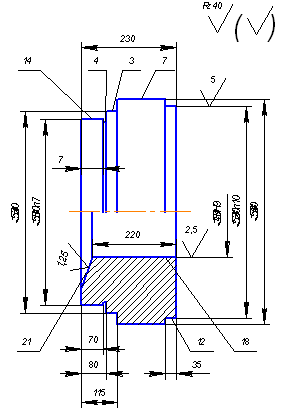
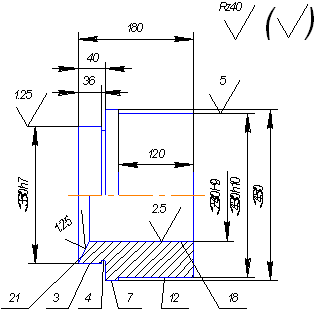
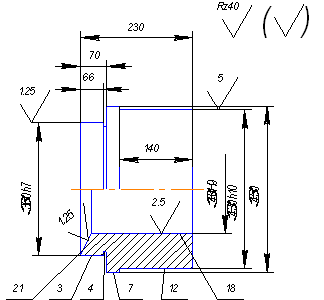
Описание назначения детали
Нарезать 4 резьбы М10-Н7
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Время с вязанное с переходами
Считаем штучное время
Считаем штучное время
Технические характеристики оборудований
Вертикально – сверлильный станок модели 2А125
Круглошлифовальный станок модели 3Б151
Промышленный робот модели М20.Ц48.01
Требования безопасности при работе на токарных станках
Требования безопасности при работе на шлифовальных станках
Если они загружены в полном объёме, то коэффициент загрузки равен 1
Расчет общей численности работающих на участке
Расчет численности вспомогательных рабочих
Расчет фондов заработанной платы основных рабочих
Расчет фондов заработанной платы вспомогательных рабочих
Определение потребности в основных материалах
Расчет стоимости нормативно - чистовой продукции
Навигация
Технические характеристики оборудований
Разработка автоматизированного участка изготовления детали "Фланец"
136578
знаков
22
таблицы
11
изображений
9 Технические характеристики оборудований
9.1 Токарный станок с ЧПУ модели 16К20Ф3
| Техническая характеристика | Станок модели 16К20Ф3 |
| Наибольший диаметр устанавливаемого изделия над станиной, мм. | 500 |
| Наибольший диаметр обрабатываемого изделия, мм: над суппортом над станиной | 1 220 - |
| Наименьший диаметр обрабатываемой изделия при 10 инструментах, мм | - |
| Высота резца, устанавливаемого в резцедержателе, мм | 25 |
| Наибольшая длина устанавливаемого изделия, мм: при установке в центах без люнета | 1000 - |
| Наибольшая длина обработки, мм | 905 |
| Наименьший длина обработки при 10 инструментах (от торца детали), мм | - |
| Центр шпинделя с конусом морзе по ГОСТ 13214 – 79 | 6 |
| Конец шпинделя фланцевого по ГОСТ 12593 – 72 | 6К |
| Диаметр цилиндрического отверстия в шпинделе, мм | 55 |
| Центр пиноли с конусом морзе по ГОСТ 13214 – 79 | 5 |
| Частота вращения шпинделя (бесступенчатое регулирование), об/мин | 22,4 – 2240 |
| Приделы частоты вращения шпинделя, устанавливаемая в ручную, об/мин: 1 диапазон 2 диапазон 3 диапазон | 22,4 – 355 63 – 900 160 - 2240 |
| Приделы программируемых подач, мм/об: продольных поперечных | 0,01 – 40 0,005 - 20 |
| Максимальная (максимальная рекомендуемая) скорость резания рабочей подачи , мм/мин. (мм/об) продольной поперечной | 2000 (2,8) 1000 (1,4) |
| Скорость быстрых ходов, мм/мин не менее: продольных поперечных | 7500 5000 |
| Дискретность перемещений, мм: продольных поперечных | 0,01 0,005 |
| Пределы шагов нарезаемых резьб, мм | 0,01 – 40,95 |
| Количество позиций автоматической поворотной головки | 6 |
| Наибольший крутящий момент на шпинделе, Н · м (кгн): | 1000 (100) |
| Предельные диаметры сверления, мм: по чугуну по стали | 28 25 |
| Габариты станка, мм, не более | 3250 х 1700 х 2145 |
| Масса станка, кг, не более | 3800 |
9.2 Вертикально – сверлильный станок модели 2А150.
| Техническая характеристика | Станок модели 2А150 |
| Размеры рабочей поверхности стола, мм: ширина длина | 500 600 |
| Наибольший диаметр сверления в стали, (σ в = 50 – 60 кгс/мм2) мм: | 50 |
| Расстояние от торца шпинделя до поверхности стола, мм | 0 – 800 |
| Расстояние от оси шпинделя до стойки (вылет шпинделя), мм | 350 |
| Наибольшее вертикальное перемещение стола, мм: | 325 |
| Наибольшее усилие подачи, кгс | — |
| Крутящий момент на шпинделе, кгсм | — |
| Конус морзе отверстие шпинделя | №5 |
| Наибольший ход шпинделя, мм | 300 |
| Наибольшее вертикальное перемещение сверлильной головки, мм | 250 |
| Скорость быстрого перемещения шпинделя, м/мин | — |
| Число ступеней оборотов шпинделя в минуту | 12 |
| Пределы или значения чисел оборотов шпинделя в минуту | 32 250 47 350 63 500 89 735 125 996 185 1400 |
| Число ступеней подач шпинделя | 9 |
| Пределы подач или подачи шпинделя мм/об | 0,12 0,62 0,20,9 0,28 1,17 0,41,8 2,64 |
| Мощность электродвигателей, кВт: привода главного движения привода насоса охлаждения привода быстрого перемещения | 7,5 0,125 — |
| Габариты станка, мм: длина ширина высота | 1550 1065 2865 |
| Масса станка, кг | 2250 |
Похожие работы
... требований техники безопасности; Выбор вспомогательных устройств осуществляется в зависимости от типа, формы, массы, материала и размеров деталей, технологических схем оборудования и серийности производства. Для обработки деталей типа тел вращения применяются токарно-винторезные станки. При автоматизации производства необходимо применение станков с ЧПУ, поэтому для обеспечения данного условия ...

... В СФЕРЕ ПОДГОТОВКИ ПРОИЗВОДСТВА. Экономия от снижения себестоимости проектирования определяется по формуле: Э’ = (C1 - C2) * А2, где C1 - себестоимость проектирования элемента конструкции или разработки одного технологического процесса при существующем способе проектирования, руб.; С2 - себестоимость проектирования элемента конструкции или разработки одного технологического процесса при ...
... расчеты показали, что существенные различия длительности сборочно-сварочных операций на отдельных РТК делают нецелесообразным создание автоматической линии сварки барабана с единой системой управления. Поэтому решено было организовать роботизированный технологический участок, объединив отдельные РТК общей механизированной транспортной системой с накопителями между ними. Для левого и правого ...

... автооператора строго синхронизировано с работой обслуживаемого оборудования. Автооп-ры могут иметь механические, магнитные, электромагнитные, вакуумные захватные устройства. 11. Транспортно – складские системы автоматизированного производства. Требования, основные виды и примеры исполнений Транспортные устройства автоматизир-ных систем предназначены для перемещения деталей с позиции на позицию ...
0 комментариев