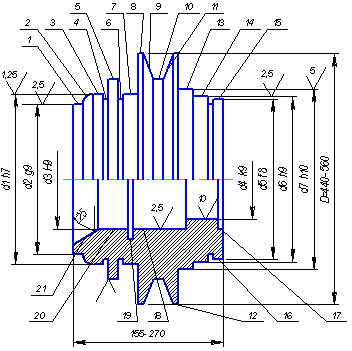
Описание назначения детали
Нарезать 4 резьбы М10-Н7
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Определяем скорость резанияV
Время с вязанное с переходами
Считаем штучное время
Считаем штучное время
Технические характеристики оборудований
Вертикально – сверлильный станок модели 2А125
Круглошлифовальный станок модели 3Б151
Промышленный робот модели М20.Ц48.01
Требования безопасности при работе на токарных станках
Требования безопасности при работе на шлифовальных станках
Если они загружены в полном объёме, то коэффициент загрузки равен 1
Расчет общей численности работающих на участке
Расчет численности вспомогательных рабочих
Расчет фондов заработанной платы основных рабочих
Расчет фондов заработанной платы вспомогательных рабочих
Определение потребности в основных материалах
Расчет стоимости нормативно - чистовой продукции
Навигация
Определяем скорость резанияV
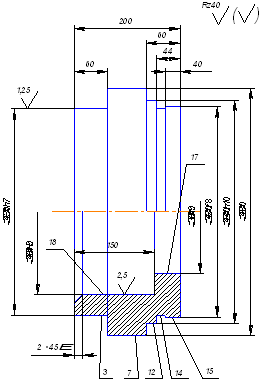
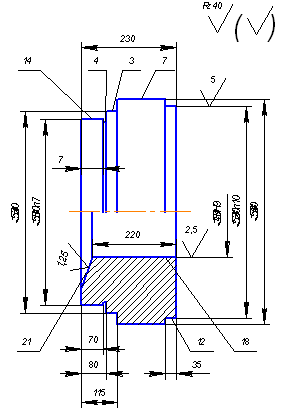
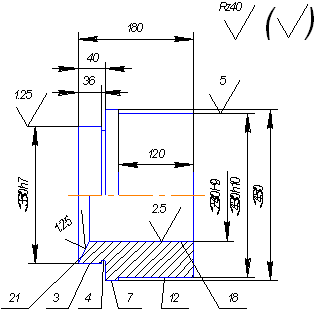
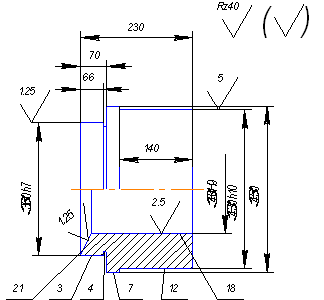
Разработка автоматизированного участка изготовления детали "Фланец"
136578
знаков
22
таблицы
11
изображений
4 Определяем скорость резанияV.
V = Vт · Кvи · Кvф · Кv1 · Кvо , м/мин.
Vт = 190;Кvи = 0,65;Кvф = 0,86;Кv1 = 1,2;Кvо = 1,0;
V = 190 · 0,65 · 0,86· 1,2· 1,0 = 127 м/мин.
5 Подсчитываем число оборотов шпинделя п:
![]() об/мин.
об/мин.
где π – постоянная
 об/мин.
об/мин.
6 Определяем основное время Т0, мин:
![]() ,
,
L = ![]()
L = ![]() мм;
мм;
L1= 5; i =1;
 мин.
мин.
Операция 015 Токарная
Содержание операции: Переход 2. Точить поверхность 2 ø 54 мм. (начерно)
Исходные данные:
Оборудование – Токарный станок с ЧПУ мод. 16К20ФЗ
Приспособление – Оправка кулачковая шпиндельная ГОСТ 17528 – 05
Мерительный инструмент – Индуктивная скоба
Режущий и рабочий инструмент – Резец проходной (отогнутый) Т5К10 ГОСТ 21151 – 03 Тип 4 Пластины ГОСТ: режущая 19048 – 06 ; опорная 19075 - 06
Обработка - Эмульсия на основе НГЛ-205А(Б) ТУЗ8.101547-2004
D = 57 мм, диаметр до обработки
d = 54 мм, диаметр после обработки
l = 75 мм, длина обрабатываемой поверхности
Расчёт припусков и режимов резания
1 Определяем припуск на обработку:
По чертежу детали для заданного торцаопределяемвеличину межоперационного припуска П, мм
П = D – d; П = 57 – 54 = 3 мм.
2 Устанавливаем глубину резания t, мм: t =![]() ;t =
;t = мм;
мм;
3 Выбираем подачу S и коэффициенты:
S = Sо · Кsn · Кsж · Кsи · Кsм ;
Sо = 0,57; Кsn = 1,0;Кsж = 0,83; Кsи = 1,0; Кsм = 1,07;
S = 0,57 · 1,0 · 0,83 · 1,0 · 1,07 = 0,5 мм/об.
4 Определяем скорость резанияV:
V = Vт · Кvи · Кvф · Кvж · Кvи · Кvо , м/мин.
Vт = 190;Кvи = 0,65;Кvф = 0,86;Кvж = 0,82;Кvи = 1,0;Кvо = 1,0;
V = 190· 0,65 · 0,86· 0,82· 1,0· 1,0 = 87 м/мин.
5 Подсчитываем число оборотов шпинделя п:
![]() об/мин.
об/мин.
 об/мин.
об/мин.
6 Определяем основное время Т0, мин:
![]() , где
, где
L = l +y1 + y2
l = 75; i =1;
L = 75 мм.
 мин.
мин.
Операция 015 Токарная
Содержание операции: Переход 3. Точить торец 3 (начерно)
Исходные данные:
Оборудование – Токарный станок с ЧПУ мод. 16К20ФЗ
Приспособление – Оправка кулачковая шпиндельная ГОСТ 17528 – 05
Мерительный инструмент – Шаблон или скоба линейная односторонняя
Режущий и рабочий инструмент – Резец проходной (отогнутый) Т5К10 ГОСТ 21151 – 03 Тип 4 Пластины ГОСТ: режущая 19048 – 06 ; опорная 19075 - 06
Обработка - Эмульсия на основе НГЛ-205А(Б) ТУЗ8.101547-2004
D = 95 мм, диаметр обрабатываемой заготовки
Расчёт припусков и режимов резания
1 Определяем припуск на обработку:
По чертежу детали для заданного торцаопределяемвеличину межоперационного припуска П, мм
П = 1,5 мм.
2 Устанавливаем глубину резания t, мм: t = П ;t =![]() мм;
мм;
3 Выбираем подачу S и коэффициенты:
S = Sо · Кsn · Кsж · Кsи · Кsм ;
Sо = 0,57; Кsn = 1,0;Кsж = 0,95; Кsи = 1,0; Кsм = 1,07;
S = 0,57 · 1,0 · 0,95 · 1,0 · 1,07 = 0,6 мм/об.
Похожие работы
... требований техники безопасности; Выбор вспомогательных устройств осуществляется в зависимости от типа, формы, массы, материала и размеров деталей, технологических схем оборудования и серийности производства. Для обработки деталей типа тел вращения применяются токарно-винторезные станки. При автоматизации производства необходимо применение станков с ЧПУ, поэтому для обеспечения данного условия ...

... В СФЕРЕ ПОДГОТОВКИ ПРОИЗВОДСТВА. Экономия от снижения себестоимости проектирования определяется по формуле: Э’ = (C1 - C2) * А2, где C1 - себестоимость проектирования элемента конструкции или разработки одного технологического процесса при существующем способе проектирования, руб.; С2 - себестоимость проектирования элемента конструкции или разработки одного технологического процесса при ...
... расчеты показали, что существенные различия длительности сборочно-сварочных операций на отдельных РТК делают нецелесообразным создание автоматической линии сварки барабана с единой системой управления. Поэтому решено было организовать роботизированный технологический участок, объединив отдельные РТК общей механизированной транспортной системой с накопителями между ними. Для левого и правого ...

... автооператора строго синхронизировано с работой обслуживаемого оборудования. Автооп-ры могут иметь механические, магнитные, электромагнитные, вакуумные захватные устройства. 11. Транспортно – складские системы автоматизированного производства. Требования, основные виды и примеры исполнений Транспортные устройства автоматизир-ных систем предназначены для перемещения деталей с позиции на позицию ...
0 комментариев